摘要
本文整理了 2025Spring 李言辉老师的《高级算法》课程复习题。
部分内容来自《算法导论》,推荐作为复习参考。
算法复杂度
- 最坏复杂度:算法在任何输入实例上运行时间的最坏情况,记为 $T_{\text{worst}}(n)$。
- 举例:快速排序最坏情况 $O(n^2)$(当数组已有序且主元选择不当)。
- 平均复杂度:算法在所有可能输入实例上运行时间的期望,记为 $T_{\text{avg}}(n)$。
- 举例:快速排序平均情况 $O(n \log n)$。
- 最优复杂度:算法在“最优”输入实例上的最低运行时间(较少使用)。
- 举例:冒泡排序在已有序数组上为 $O(n)$。
渐近记号定义与函数证明
定义:
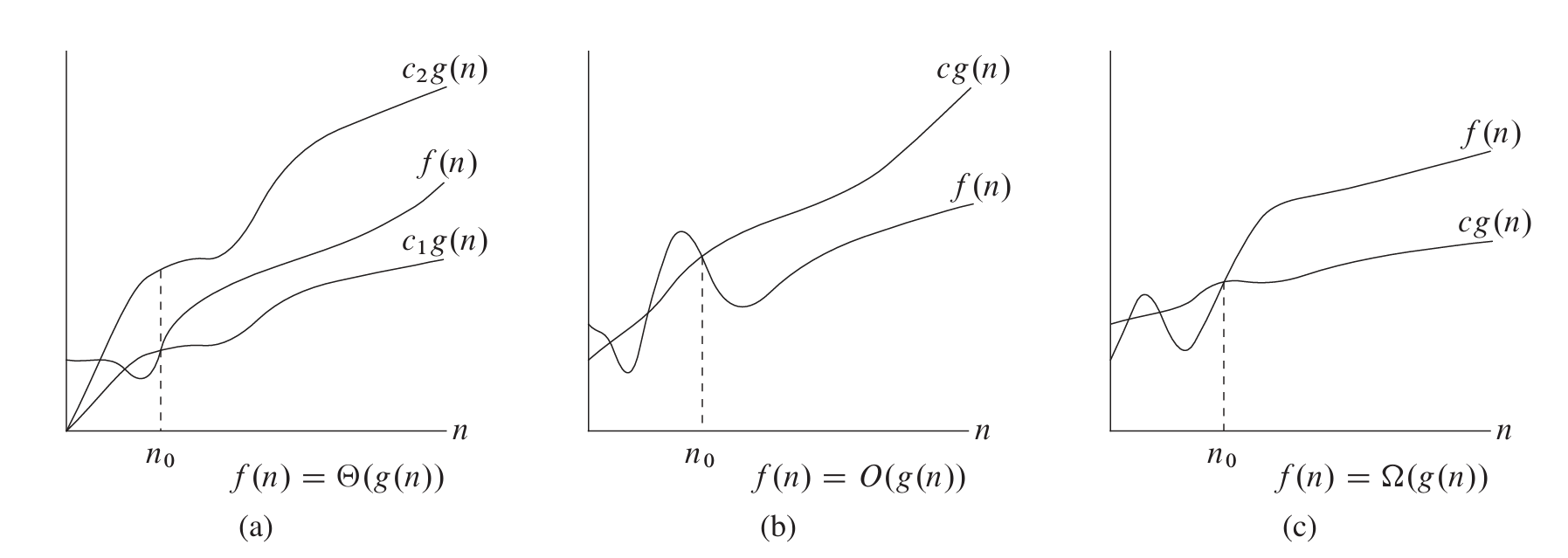
$$ O(g(n)) = \set{ f(n) \mid \exists c>0, n_0>0 : 0 \leq f(n) \leq cg(n), \ \forall n \geq n_0 } $$
$$ \Omega(g(n)) = \set{ f(n) \mid \exists c>0, n_0>0 : 0 \leq cg(n) \leq f(n), \ \forall n \geq n_0 } $$
$$ \Theta(g(n)) = O(g(n)) \cap \Omega(g(n)) $$
《算法导论》给出了三者的形象描述:
函数证明:
$$ 3n^3 + 2n^2 + 10 \in \Theta(n^3) $$
证明:
$$ \begin{align} \text{上界:} & 3n^3 + 2n^2 + 10 \leq 3n^3 + 2n^3 + 10n^3 = 15n^3, \ \forall n \geq 1 \ & \Rightarrow 3n^3 + 2n^2 + 10 \in O(n^3) \ \text{下界:} & 3n^3 + 2n^2 + 10 \geq 3n^3, \ \forall n \geq 0 \ & \Rightarrow 3n^3 + 2n^2 + 10 \in \Omega(n^3) \end{align}
\therefore 3n^3 + 2n^2 + 10 \in \Theta(n^3) $$
递归关系求解
解递归式:
$$ a_n = r_1 a_{n-1} + r_2 a_{n-2} $$
解法(特征方程法):
- 特征方程: $x^2 - r_1 x - r_2 = 0$,解得根 $x_1, x_2$。
- 通解: $$ a_n = \begin{cases} c_1 x_1^n + c_2 x_2^n & (x_1 \neq x_2) \ (c_1 + c_2 n) x_1^n & (x_1 = x_2) \end{cases} $$
- 代入初始条件求解 $c_1, c_2$。
例如,对于
$$ a_0 = 1, a_1 = 1, a_n = a_{n-1} + a_{n-2}, $$
则特征方程为
$$ x^2 - x - 1 = 0 $$
其解为
$$ x_1 = \frac{1 - \sqrt{5}}{2}, x_2 = \frac{1 + \sqrt{5}}{2} $$
对于通项公式
$$ a_n = c_1 x_1^n + c_2 x_2^n $$
代入
$$ a_0 = 1, a_1 = 1 $$
解得
$$ c_1 = \frac{5 - \sqrt{5}}{10}, c_2 = \frac{5 + \sqrt{5}}{10} $$
则通项公式为
$$ a_n = \frac{5 - \sqrt{5}}{10} (\frac{1 - \sqrt{5}}{2})^n + \frac{5 + \sqrt{5}}{10} (\frac{1 + \sqrt{5}}{2})^n $$
主定理应用
求解一般式:
$$ T(n) = bT(n/c) + f(n) $$
主定理:
- 若 $f(n) \in O(n^{\log_c b - \epsilon})$,则 $T(n) \in \Theta(n^{\log_c b})$。
- 若 $f(n) \in \Theta(n^{\log_c b} \log^k n)$,则 $T(n) \in \Theta(n^{\log_c b} \log^{k+1} n)$。
- 若 $f(n) \in \Omega(n^{\log_c b + \epsilon})$ 且 $a f(n/c) \leq k f(n)$($k<1$),则 $T(n) \in \Theta(f(n))$。
示例 1:$T(n) = 2T(n/2) + n \log n$
$\log_b a = 1$,$f(n)=n\log n=\Theta(n^1 \log^1 n) \Rightarrow T(n)=\Theta(n \log^2 n)$。
示例 2:$T(n) = 3T(n/2) + n \log n$
$$ T(n) \in \Theta(3^{\log_2 n}) = \Theta(n^{\log_2 3}) $$
堆的定义与操作
- 定义:完全二叉树,满足堆性质(小根堆:$ \forall i,\ A[i] \leq A[\text{child}(i)] $)。
- 数组表示:下标从 1 开始,$A[i]$ 的父节点在 $A[\lfloor i/2 \rfloor]$,子节点在 $A[2i]$ 和 $A[2i+1]$。
- 操作:
Insert(x):插至末尾,向上调整($\textbf{UpHeap}$),时间复杂度 $O(\log n)$。ExtractMin():取根元素,末尾元素移至根,向下调整($\textbf{DownHeap}$),时间复杂度 $O(\log n)$。
快排平均复杂度分析复用
解递归式: $A(n) = (n-1) + \frac{2}{n} \sum_{i=1}^{n-1} A(i)$
步骤:
- 两边乘 $n$: $nA(n) = n(n-1) + 2 \sum_{i=1}^{n-1} A(i)$。
- 写 $(n-1)A(n-1) = (n-1)(n-2) + 2 \sum_{i=1}^{n-2} A(i)$。
- 相减消和式: $$ \begin{align*} nA(n) - (n-1)A(n-1) &= 2n-2 + 2A(n-1) \ \Rightarrow A(n) &= A(n-1) \frac{n+1}{n} + \frac{2n-2}{n} \ \Rightarrow \frac{A(n)}{n+1} &= \frac{A(n-1)}{n} + \frac{2(n-1)}{n(n+1)} \end{align*} $$
- 令 $B(n) = \frac{A(n)}{n+1}$,则有:
$$ B(n) = B(n-1) + \frac{2(n-1)}{n(n+1)} = B(n-1) + \frac{3}{n+1} - \frac{1}{n} $$
$$ B(n) = B(0) + \sum_{i=1}^{n}(\frac{3}{n+1} - \frac{1}{n}) $$
显然,$B(n) \in O(\log n)$,因此 $A(n) \in O(n \log n)$。
对抗策略分析
含义:通过构造最坏输入序列证明算法复杂度的下界。
问题:在数组中同时找到最大元素和最小元素
算法(分组比较法):
- 基本思路:采用分治策略,将元素两两分组处理,减少冗余比较。
- 具体步骤:
- 分组比较:将元素分为 $\lfloor n/2 \rfloor$ 对(若 $n$ 为奇数,则保留一个元素单独处理)。每对比较一次,得到局部最小值和局部最大值(较小者参与最小值后续比较,较大者参与最大值后续比较)。比较次数:$\lfloor n/2 \rfloor$。
- 找全局最小值:从所有局部最小值(共 $\lceil n/2 \rceil$ 个)中找全局最小值,比较次数:$\lceil n/2 \rceil - 1$。
- 找全局最大值:从所有局部最大值(共 $\lceil n/2 \rceil$ 个)中找全局最大值,比较次数:$\lceil n/2 \rceil - 1$。
- 总比较次数:
- $n$ 为偶数:$\frac{n}{2} + 2 \times \left( \frac{n}{2} - 1 \right) = \frac{3n}{2} - 2$。
- $n$ 为奇数:设 $n = 2k + 1$,比较次数为 $3k - 1 = \left\lceil \frac{3n}{2} \right\rceil - 2$(因为 $\left\lceil \frac{3n}{2} \right\rceil = \frac{3n + 1}{2}$ 当 $n$ 为奇数)。
下界证明:$\left\lceil \frac{3n}{2} \right\rceil - 2$(对抗策略)
- 目标:证明任何算法在最坏情况下都至少需要 $\left\lceil \frac{3n}{2} \right\rceil - 2$ 次比较。
- 对抗策略:对手通过控制比较结果最大化算法的不确定性:
- 初始状态:每个元素同时是最大值和最小值的候选(共 $2n$ 个候选状态)。
- 当算法比较两个元素 $a$ 和 $b$:
- 若两者均同时是最大值和最小值候选:对手返回 $a < b$(固定顺序),并更新:
- $a$ 不再是最大值候选(因为 $\exists b > a$),
- $b$ 不再是最小值候选(因为 $\exists a < b$)。
- 效果:最大值候选数减 1,最小值候选数减 1。
- 其他情况:对手选择结果以最小化状态减少(如仅使一个候选集减 1)。
- 候选状态变化:
- 最大值候选数需从 $n$ 减至 $1$(减少 $n-1$ 个),
- 最小值候选数需从 $n$ 减至 $1$(减少 $n-1$ 个)。
- 总需减少状态数:$2(n-1)$。
- 关键观察:
- 最有效的比较(同时减少两个候选集)最多发生 $\lfloor n/2 \rfloor$ 次(即分组阶段),对应减少 $2 \lfloor n/2 \rfloor$ 个状态。
- 剩余状态数:$2(n-1) - 2 \lfloor n/2 \rfloor$。
- 剩余比较需单步减少(每次减 1),所需比较次数:$2(n-1) - 2 \lfloor n/2 \rfloor$。
- 总最坏比较次数: $$ \underbrace{\left\lfloor \frac{n}{2} \right\rfloor}{\text{分组}}+\underbrace{2(n-1) - 2 \left\lfloor \frac{n}{2} \right\rfloor}{\text{剩余}} = 2n - 2 - \left\lfloor \frac{n}{2} \right\rfloor $$ 结合奇偶性分析:
- 若 $n$ 为偶数:$2n - 2 - n/2 = 3n/2 - 2$。
- 若 $n$ 为奇数:$2n - 2 - (n-1)/2 = (4n - 4 - n + 1)/2 = (3n - 3)/2 = \frac{3n}{2} - \frac{3}{2}$,而 $\left\lceil \frac{3n}{2} \right\rceil - 2 = \frac{3n + 1}{2} - 2 = \frac{3n - 3}{2}$(因为 $\lceil 3n/2 \rceil = (3n+1)/2$),故相等。
- 紧致性:分组比较法达到此下界,证明其最优。
问题:在 $n$ 个元素中找第二大元素
算法(锦标赛方法)
- 基本思路:模拟单淘汰锦标赛:
- 阶段 1(找最大值):元素两两比较,胜者(较大者)晋级。重复直至确定最大值(冠军)。
- 比较次数:$n-1$(每场淘汰 1 个元素)。
- 最大元素的直接对手:在晋级路径中,最大值依次击败 $k$ 个元素,其中 $k = \lceil \log n \rceil$(树的高度)。
- 阶段 2(找第二大):在最大元素的 $k$ 个直接对手中,用 $k-1$ 次比较找到最大值(即第二大)。
- 总比较次数:$(n-1) + (\lceil \log n \rceil - 1) = n + \lceil \log n \rceil - 2$。
下界证明:$n + \lceil \log n \rceil - 2$(对抗策略)
- 核心定理:第二大元素 $S$ 必须直接与最大元素 $M$ 比较过(否则无法验证其为第二大)。
反证:若 $S$ 未与 $M$ 比较,则存在元素 $T$ 使得 $M > T > S$ 且算法未比较 $T$ 与 $S$(对手可设置 $T$ 破坏 $S$ 的第二大地位)。
- 对抗策略:
- 对手维护最大元素候选集和第二大元素候选集。
- 当算法比较两个元素时,对手选择结果使:
- 最大元素 $M$ 尽可能迟地被确定(需至少 $n-1$ 次比较),
- 第二大元素候选集尽可能大(至少保留 $\lceil \log n \rceil$ 个候选)。
- 下界分析:
- 确认最大元素 $M$:需至少 $n-1$ 次比较($M$ 必须击败所有其他元素)。
- 确认第二大元素 $S$:$S$ 必须直接败给 $M$,且是 $M$ 的直接对手中的最大者。
- $M$ 至少有 $\lceil \log n \rceil$ 个直接对手(因为其晋级路径高度为 $\lceil \log n \rceil$)。
- 在 $\lceil \log n \rceil$ 个候选中找到最大值需 $\lceil \log n \rceil - 1$ 次比较。
- 总比较次数下界: $$ (n-1) + (\lceil \log n \rceil - 1) = n + \lceil \log n \rceil - 2. $$
- 紧致性:锦标赛方法达到该下界,证明其最优性。
平摊分析
含义:将操作序列的总代价分摊到每个操作的平均代价。
栈的 MultiPop 操作:平摊分析(会计法)
问题描述
- 栈支持两种操作:
Push(x):压入元素 $x$,实际代价为 $1$。MultiPop(k):弹出栈顶 $k$ 个元素(若元素不足,则弹出所有),实际代价为弹出元素个数。
- 序列从空栈开始,分析 $n$ 次操作的平摊代价。
会计法分析
- 平摊代价分配:
Push:分配平摊代价 $$2$。- $$1$ 用于支付
Push操作本身的实际代价。 - $$1$ 存储为信用,用于支付该元素未来被弹出的代价。
- $$1$ 用于支付
MultiPop(k):分配平摊代价 $$0$。- 弹出每个元素时,使用其存储的 $$1$ 信用支付实际代价。
- 总平摊代价分析:
- 设操作序列中有 $t$ 次
Push操作。 Push总平摊代价:$2t$。MultiPop平摊代价:$0$。- 总平摊代价 $=2t$。
- 设操作序列中有 $t$ 次
- 实际代价说明:
MultiPop弹出的元素总数 $\leq t$(因元素均由Push压入)。- 总实际代价 $\leq$(
Push代价)$+$(MultiPop弹出总代价)$= t + t = 2t$。
- 平摊结论:
- 总实际代价 $\leq 2t \leq 2n$($n$ 为操作序列长度)。
- 每个操作的平均代价 $O(1)$。
删除大于中位数的元素:DeleteLargerHalf(平摊分析:势能法)
问题描述
- 动态集合支持:
Insert(x):插入元素 $x$,实际代价 $O(1)$。DeleteLargerHalf():删除大于中位数的元素(即删除 $\lceil n/2 \rceil$ 个最大元素),实际代价 $O(n)$(使用线性时间选择算法)。
- 分析 $m$ 次操作序列的平摊代价。
势能法分析
- 势能函数:$\Phi = 2 \cdot |S|$,其中 $|S|$ 是集合当前元素个数。
- 操作分析:
Insert操作:- 实际代价:$1$。
- 势能变化:$\Delta\Phi = 2(|S|+1) - 2|S| = 2$。
- 平摊代价:$1 + 2 = 3$。
DeleteLargerHalf操作:- 设操作前集合大小为 $n$。
- 实际代价:$c \cdot n$($c$ 为正常数,来自选择算法)。
- 删除元素数:$d = \lceil n/2 \rceil$。
- 势能变化:$\Delta\Phi = 2(n - d) - 2n = -2d$。
- 平摊代价:$c \cdot n - 2d$。
平摊代价上界证明
- 关键不等式: $$ c \cdot n - 2d \leq cn - 2 \cdot \frac{n}{2} = (c-1)n $$ 因为 $d \geq n/2$。
- 总平摊代价:
- 设序列中有 $I$ 次
Insert,$D$ 次DeleteLargerHalf。 Insert总平摊代价:$3I$。DeleteLargerHalf总平摊代价:$\sum_{i=1}^D (c \cdot n_i - 2d_i)$。- 总平摊代价 $\leq 3I + (c-1) \sum_{i=1}^D n_i$。
- 设序列中有 $I$ 次
$\sum n_i$ 的界
- 引理:$\sum_{\text{del}} n_i \leq 2I$。
- 证明:
- 记 $d_i$ 为第 $i$ 次删除的元素数,则 $\sum_{i=1}^D d_i = I - L \leq I$($L$ 为最终元素数)。
- 由 $d_i \geq n_i / 2$,得 $n_i \leq 2d_i$,求和得 $\sum n_i \leq 2\sum d_i \leq 2I$。
- 证明:
- 总平摊代价: $$ \begin{align*} \text{总平摊} &\leq 3I + (c-1) \cdot 2I \ &= (2c + 1)I \ &= O(I) \end{align*} $$
- 最终结论:
- $I \leq m$($m$ 为操作序列长度)。
- 总平摊代价 $= O(m)$。
- 每个操作平摊代价 $O(1)$。
两种分析的核心思想对比
| 方法 | 适用场景 | 核心技巧 | 分析目标 |
|---|---|---|---|
| 会计法 | 操作间存在"预支付"关系 | 为高风险操作分配额外信用 | 单次操作平摊代价 |
| 势能法 | 状态变化连续的复杂操作序列 | 定义势能函数描述系统状态,关联实际代价变化 | 证明总代价上界 |
两种方法均证明:单次最坏操作代价虽高,但序列平均代价为常数。
图搜索算法应用
深度优先搜索(DFS)思想:递归探索未访问邻居,回溯时处理节点
应用:
- 拓扑排序:在 DAG 上运行 DFS,按结束时间逆序排列。
- 强连通分量(SCC):Kosaraju 算法(正图 DFS + 反图 DFS)。
广度优先搜索(BFS)思想:按层遍历,使用队列管理节点
应用:
- 最短路径(无权图):记录起点到各点的层数(距离)。
- 任务调度关键路径:基于拓扑序的 BFS 计算最早开始时间。
贪心法原理与应用
-
思想:局部最优选择扩展至全局解。
-
特点:高效但不一定全局最优,需证明正确性(贪心选择性质与最优子结构)。
-
换硬币问题(特定面额):
- 策略:每次选最大面额硬币。
- 证明:若面额满足 $c_i > c_j \Rightarrow c_i \geq 2c_j$,则贪心法最优。
-
活动安排问题:
- 策略:选结束时间最早且与已选活动兼容的活动。
- 证明(贪心选择性):设最优解包含活动 $a_k$(最早结束),用 $a_k$ 替换另一相容活动结果不变。
动态规划原理与应用
- 思想:将问题分解为重叠子问题,自底向上或备忘录求解。
- 特点:需满足最优子结构(子问题最优解组合为原问题最优解)。
最长公共子序列(LCS)
递归式:
$$ \text{LCS}(X_i, Y_j) = \begin{cases} 0 & i=0 \text{ 或 } j=0 \ \text{LCS}(X_{i-1}, Y_{j-1}) + 1 & x_i = y_j \ \max \left{ \text{LCS}(X_{i-1}, Y_j), \text{LCS}(X_i, Y_{j-1}) \right} & x_i \neq y_j \end{cases} $$
伪代码:
1 | |
最优二叉搜索树(OBST)
关于问题和算法的讲解:最优二叉搜索树 动态规划算法_哔哩哔哩_bilibili
问题定义
- 二叉搜索树(BST):满足每个节点的左子树键值 ≤ 该节点键值 ≤ 右子树键值的二叉树
- 访问频率:每个键 $k_i$ 有搜索频率 $p_i$(成功),区间 $d_i$ 有搜索频率 $q_i$(失败)
- 目标:构建 BST 使搜索期望代价最小(考虑键值比较次数)
搜索代价公式
$$ E[\text{cost}] = \sum_{i=1}^{n} (\text{depth}(k_i)+1)·p_i + \sum_{i=0}^{n} (\text{depth}(d_i)+1)·q_i $$
核心递归式
令 $e[i][j]$ 表示包含键 $k_i$ 到 $k_j$ 的最优二叉搜索树的期望搜索代价
$$ \boxed{ e[i][j] = \begin{cases} q_{i-1} & \text{if } j = i-1 \ \min\limits_{i \leq r \leq j} \left{ e[i][r-1] + e[r+1][j] + w(i,j) \right} & \text{if } i \leq j \end{cases} } $$
其中:
- $w(i,j) = \sum_{l=i}^{j} p_l + \sum_{l=i-1}^{j} q_l$(区间总频率)
- $r$ 为当前子树的根节点
动态规划解法
1. 计算频率前缀和
1 | |
2. 自底向上填表
1 | |
示例 ($n=4$)
| 键 | 频率 $p_i$ | 区间 | 频率 $q_i$ |
|---|---|---|---|
| $k_1$ | 0.15 | $d_0$ | 0.05 |
| $k_2$ | 0.10 | $d_1$ | 0.10 |
| $k_3$ | 0.05 | $d_2$ | 0.05 |
| $k_4$ | 0.10 | $d_3$ | 0.05 |
| $d_4$ | 0.10 |
计算 $e$ 表:
1 | |
最终代价:$e[1][4]=1.75$
时间复杂度分析
- 三重循环:$O(n^3)$
- 空间复杂度:$O(n^2)$
- 重建最优树:根据
root表递归构造
Knuth 优化
发现最优根位置满足:
$$ \text{root}[i][j-1] \leq \text{root}[i][j] \leq \text{root}[i+1][j] $$
优化后时间复杂度降为 $O(n^2)$:
1 | |
OBST vs Huffman 树
| 特性 | 最优二叉搜索树 | Huffman 编码树 |
|---|---|---|
| 键位置 | 有序 | 无序 |
| 结构要求 | 满足 BST 性质 | 无结构限制 |
| 频率类型 | 成功+失败频率 | 仅叶节点频率 |
| 时间复杂度 | $O(n^3)$ 或 $O(n^2)$ | $O(n\log n)$ |
| 主要用途 | 搜索优化 | 数据压缩 |
OBST 的核心思想:通过动态规划平衡高频键靠近树根,最小化整体期望搜索路径。它在数据库索引、语言模型等需要高效搜索的场景中有重要应用。

